A Reinforcement Learning Based Approach for Robotic Grasping Tasks I-RIM Istituto di Robotica e Macchine Intelligenti 5:01 4 years ago 686 Далее Скачать
Reinforcement learning of grasping a deformable object Robotic Manipulation for Sort and Segregation 1:47 4 years ago 133 Далее Скачать
Learning Continuous Control Actions for Robotic Grasping with Reinforcement Learning Loris Roveda 1:58 4 years ago 747 Далее Скачать
Multi-Modal Geometric Learning for Grasping and Manipulation Columbia Robotics Lab 1:00 5 years ago 467 Далее Скачать
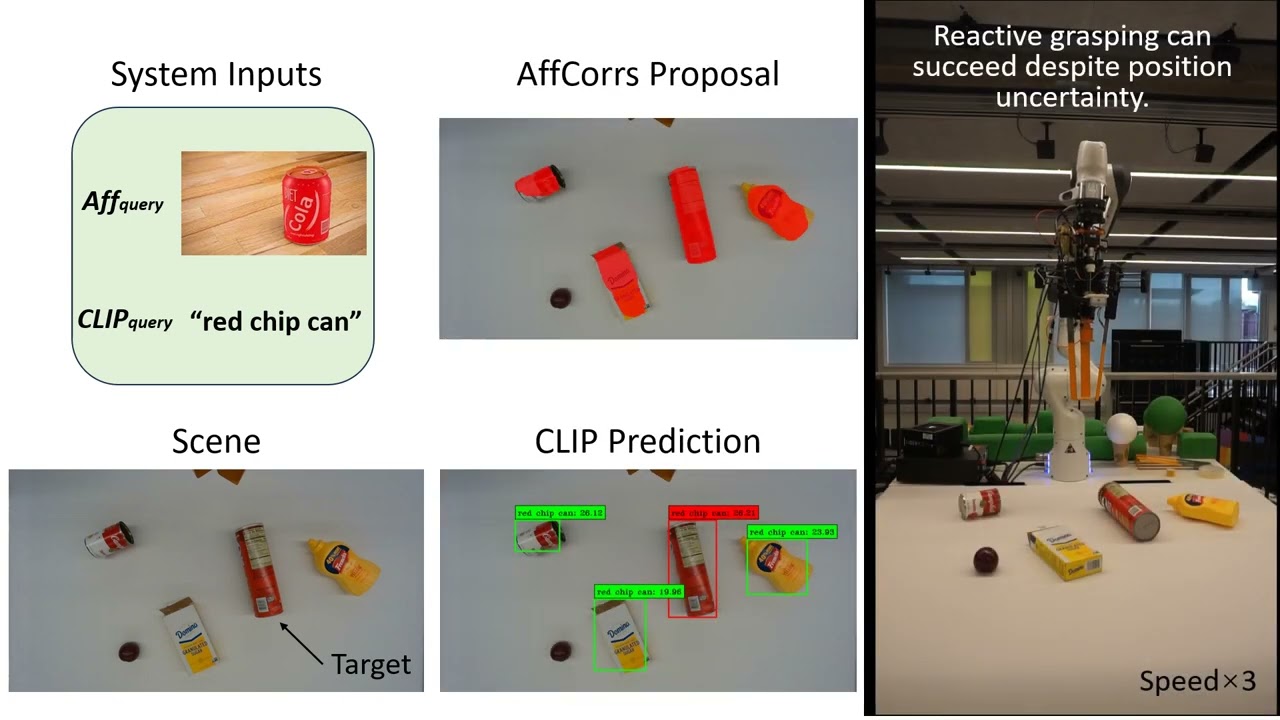
Reinforcement Learning-based Grasping via One-Shot Affordance Localization Robot Perception and Learning (RPL) 2:34 1 year ago 219 Далее Скачать
Living Object Grasping using Two-stage Graph Reinforcement Learning Zhe Hu 0:46 4 years ago 113 Далее Скачать
Thinking While Moving: Deep Reinforcement Learning with Concurrent Control Yannic Kilcher 29:41 4 years ago 3 036 Далее Скачать
Deep Reinforcement Learning for Vision-Based Robotic Grasping: A Simulated Comparative Evaluation of ICRA 2018 2:37 6 years ago 4 467 Далее Скачать
Deep Reinforcement and Evolutionary Learning for Vision Based Robot Grasping Prof. G.C Nandi 2:31 5 years ago 401 Далее Скачать
Intelligent Robot Grasping using Deep Reinforcement and Evolutionary Learning. Prof. G.C Nandi 2:07 4 years ago 105 Далее Скачать
Distributed Reinforcement Learning of Targeted Grasping with Active Vision for Mobile Manipulators Preferred Networks 0:49 4 years ago 1 584 Далее Скачать
Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning Andy Zeng 5:06 6 years ago 8 249 Далее Скачать
Reinforcement learning of grasping a deformable object Extreme Robotics Lab 1:47 1 year ago 18 Далее Скачать
Collective Robot Reinforcement Learning, Human Demonstration Ali Yahya 0:28 8 years ago 23 975 Далее Скачать
Deep learning-based method for vision-guided robotic grasping of unknown objects. Mario Sposato 1:29 4 years ago 142 Далее Скачать
Learning a visuomotor controller for real world robotic grasping using easily simulated depth images UliAtUTube 1:50 7 years ago 964 Далее Скачать